Para más info visita https://lcsc.com/
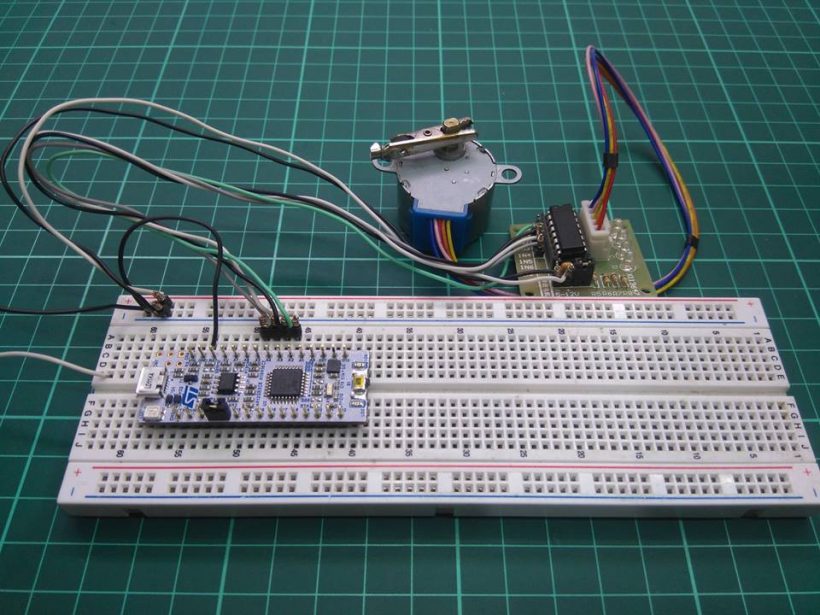
En esta review veremos como configurar la placa Nucleo 32 STM32L011K4 con el STM32Cube + Ac6 System Workbench, vamos a controlar un motor paso a paso, utilizando 4 pines de esta placa. El modelo del motor es el 28BYJ-48 y un controlador basado en el chipULN2003A.
Si quieren adquirir esta placa, pueden visitar el siguiente link de la página LCSC https://lcsc.com/product-detail/Development-Kits-Emulators-Simulators_STMicroelectronics_NUCLEO-L011K4_STMicroelectronics-NUCLEO-L011K4_C94084.html
Acerce de la placa STM32L011K4
Las placas STM32 Nucleo-32 proporcionan una forma asequible y flexible para que los usuarios prueben nuevos conceptos y construyan prototipos con los microcontroladores STM32, eligiendo entre varias combinaciones de rendimiento, consumo de energía y características. La conectividad Arduino ™ Nano hace que sea más fácil ampliar la Funcionalidad de la plataforma de desarrollo abierto STM32 Nucleo con una selección de escudos especializados. La placa STM32 Nucleo-32 no requiere ninguna sonda por separado, ya que integra el depurador / programador ST-LINK / V2-1 y viene con la completa biblioteca de software HAL STM32. , junto con varios ejemplos de software empaquetado, así como acceso directo a los recursos en línea de Arm ® Mbed Enabled ™ .
Características clave
- Microcontroladores STM32 en paquetes de 32 pines
- Tres LEDs:
- Comunicación USB (LD1), LED de alimentación (LD2) y LED de usuario (LD3)
- Botón de reinicio
- Conector de expansión de placa:
- Arduino ™ Nano
- Opciones flexibles de fuente de alimentación: ST-LINK USB V BUS o fuentes externas
- Programador / depurador ST-LINK / V2-1 incorporado con capacidad de re-enumeración USB: almacenamiento masivo, puerto COM virtual y puerto de depuración
- Apoyo de una amplia variedad de entornos de desarrollo integrado (IDE), incluyendo IAR ™ , Keil ® , IDE basados en GCC, Brazo ® mbed ™
- Compatible con Arm ® Mbed Enabled ™ (solo para algunos números de pieza de Nucleo)
IMAGEN

Hoja de datos
STMicroelectronics-NUCLEO-L011K4_C94084
Motor paso a paso 28BYJ-48
- Motor a pasos modelo 28BYJ48 con caja de reducción
- Voltaje de operación: 5VDC
- Razón de reducción: 1-64
- Angulo por paso: 5.625°/64
- Resistencia en DC típica: 50Ω±7% (25℃)
- Frecuencia máxima de operación: > 600Hz
- Torque máximo: 34.3mN.m(120Hz)




Hacemos click en “Start project”

Nos vamos a “Project” y abrimos “Settings”. También podemos elegir la carpeta donde se ubicará el mismo.

Escribimos un nombre para nuestro proyecto.
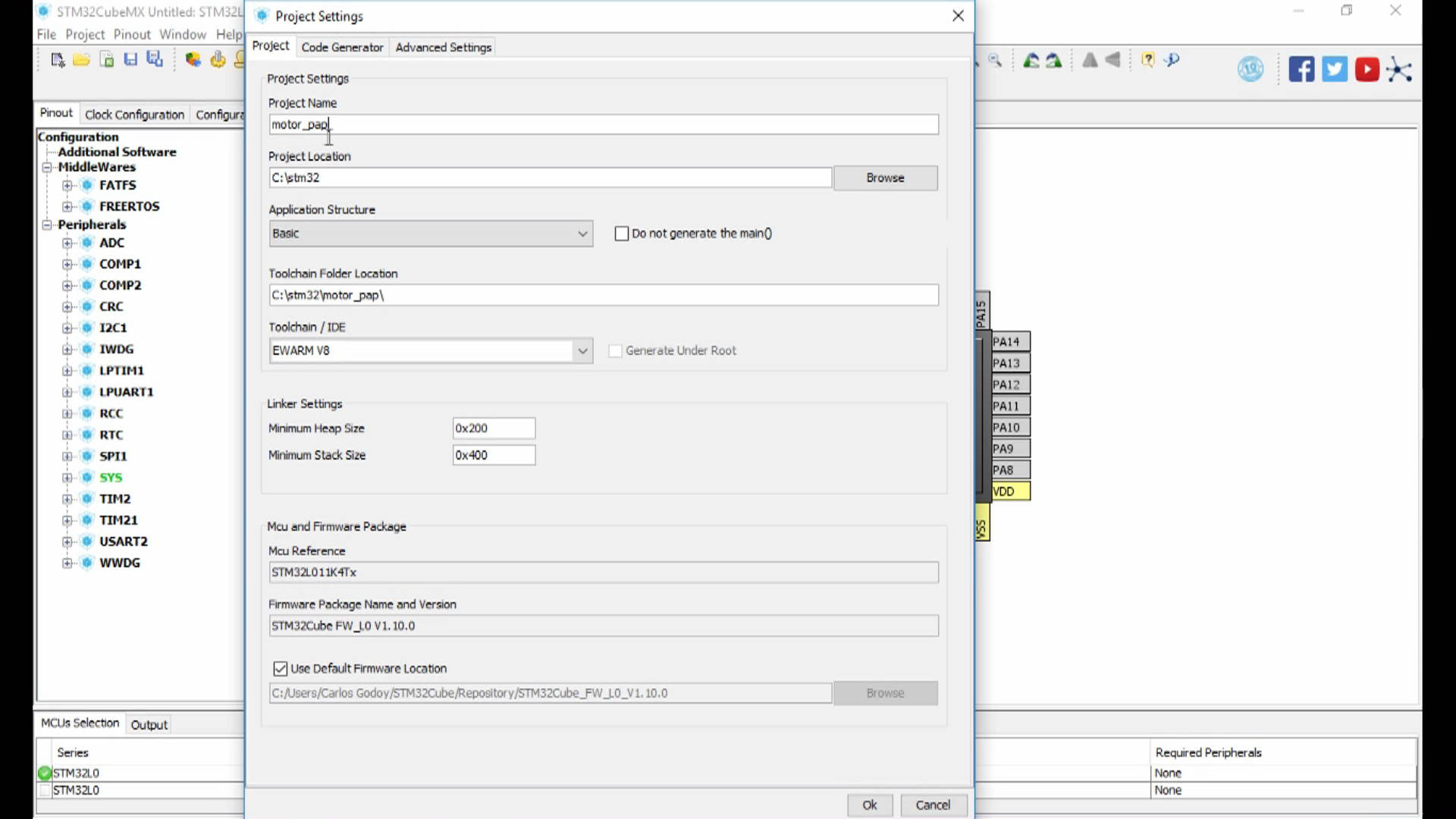

Aceptamos los cambios haciendo click en ok

Acá podemos ver el pinout del microcontrolador de la placa.

Configuraremos 4 pines como salidas, haciendo click en cada uno de ellos y elegimos “GPIO_OUTPUT”

Nos dirigimos a “configuración”

Y en “System” abrimos “GPIO”

Acá podemos configurar cada uno de los pines, en este caso vamos a ponerle una etiqueta a cada pin.


Nos vamos al ícono del engranaje.

Esperamos un poco y hacemos click en “Open Project”.


Click en ok.

Nos vamos al explorardor de proyectos y buscamos la carpeta Src y abrimos “main.c”


Ahí escribimos el código para nuestra placa.

Compilamos nuestro código para ver si está todo correcto, con el botón “buil all”.

Hacemos click en “Run configurations”.


A continucación click en “Search Project”.




Código fuente
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
/* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { HAL_GPIO_WritePin(led3_GPIO_Port, led3_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(led4_GPIO_Port, led4_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(led5_GPIO_Port, led5_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(led6_GPIO_Port, led6_Pin, GPIO_PIN_RESET); HAL_Delay(2); HAL_GPIO_WritePin(led3_GPIO_Port, led3_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(led4_GPIO_Port, led4_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(led5_GPIO_Port, led5_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(led6_GPIO_Port, led6_Pin, GPIO_PIN_RESET); HAL_Delay(2); HAL_GPIO_WritePin(led3_GPIO_Port, led3_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(led4_GPIO_Port, led4_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(led5_GPIO_Port, led5_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(led6_GPIO_Port, led6_Pin, GPIO_PIN_SET); HAL_Delay(2); HAL_GPIO_WritePin(led3_GPIO_Port, led3_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(led4_GPIO_Port, led4_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(led5_GPIO_Port, led5_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(led6_GPIO_Port, led6_Pin, GPIO_PIN_SET); HAL_Delay(2); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } |
Otros productos que vamos a revisar de LCSC

Tal vez pueda interesarte proyectos en arduino, pic, robótica, telecomunicaciones, suscribete en http://www.youtube.com/user/carlosvolt?sub_confirmation=1 mucho videos con código fuentes completos y diagramas

SUSCRIBETE A NUESTROS BOLETINES, RECIBE EN TU CORREO LAS NOTICIAS MÁS DESTACADAS, SÓLO INGRESANDO TU CORREO ELECTRÓNICO
[wysija_form id=”1″]
VIDEO RECOMENDADO