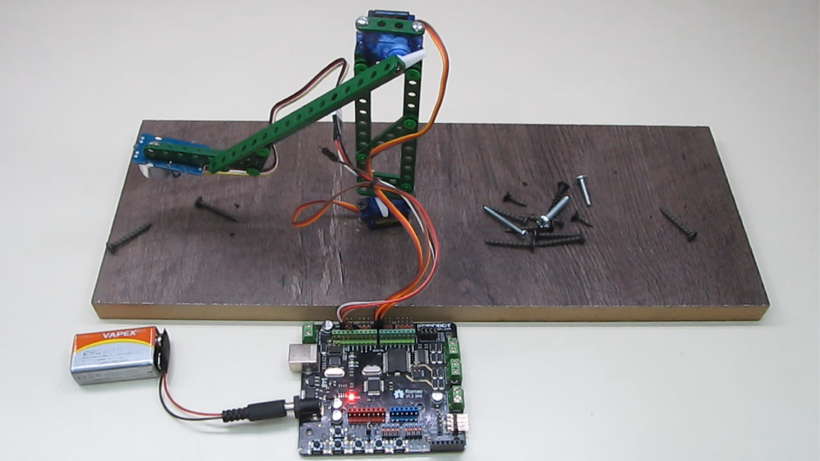
En este tutorial veremos un brazo robótico, armado con un electroimán, 2 servos, un arduino romeo y piezas del juego didáctico Supermec 5.

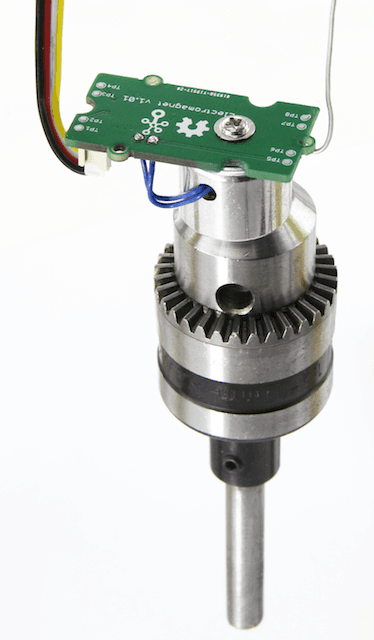
Un electroimán es un tipo de imán en el que el campo magnético es producido por una corriente eléctrica. Una corriente eléctrica que fluye en un cable crea un campo magnético alrededor del cable, debido a la ley de Ampere (vea el dibujo más arriba). Para concentrar el campo magnético, en un electroimán el cable se enrolla en una bobina con muchas vueltas de cable una al lado de la otra. El campo magnético de todas las vueltas del cable pasa a través del centro de la bobina, creando un fuerte campo magnético allí. Este electroimán puede absorber 1 kg de peso y aguantar. Es fácil de usar.
Tal vez pueda interesarte proyectos en arduino, pic, robótica, telecomunicaciones, suscribete en http://www.youtube.com/user/carlosvolt?sub_confirmation=1 mucho videos con código fuentes completos y diagramas

¿Donde conseguir el este electroiman ? Visita la página de LCSC

Especificaciones
| Parámetro | Valor |
|---|---|
| Tensión de trabajo | DC 5V |
| Corriente de trabajo | 400mA |
| Corriente de espera | 200uA |
| Peso de la carga | 1 KILOGRAMO |
Pinout cable electroiman
| Pinout | Color |
|---|---|
| 5V | rojo |
| GND | Negro |
| No conectado | Blanco |
| Pin digital | Amarillo |
Pin out SG90 Servo

Naranja–> Señal
Rojo–> Positivo
Marrón–> Negativo
Software
- Paso 1. Copie el siguiente código en Arduio IDE y cárguelo en arduino.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 |
#include <Servo.h>//Librería para el control de los servos Servo ServoUno; Servo ServoDos; int val0=0; int val1=0; int var7=0; int magneto=13; int estado=0; void setup() { ServoUno.attach(6);//El servo será controlado a través del pin 6 ServoUno.write(0);//Posición inicial del servo(modificar de ser necesario) ServoDos.attach(7);//El servo será controlado a través del pin 7 ServoDos.write(0);//Posición inicial del servo(modificar de ser necesario) pinMode(magneto, OUTPUT);//Se confira el pin del control del electroiman como salida Serial.begin(9600);//Velocidad del puesto serial } void loop() { var7 = analogRead(7);//Lectura del pin analógico 7 del arduino romeo, donde el arduino Romeo tiene conectado 5 pulsadores. //Si el valor leido es menor o igual a 100 if(var7<=100){ Serial.println("arriba"); if(val0>0){ val0=val0-5; Serial.println(val0); ServoUno.write(val0); delay(50); } } //Si el valor leido es menor o igual a 350 y mayor o igual a 300 if(var7<=350&&var7>=300){ Serial.println("abajo"); if(val0<180){ val0=val0+5; Serial.println(val0); ServoUno.write(val0); delay(100); } } //Si el valor leido es menor o igual a 200 y mayor o igual a 120 if(var7<=200&&var7>=120){ Serial.println("derecha"); if(val1<180){ val1=val1+5; Serial.println(val1); ServoDos.write(val1); delay(50); } //Si el valor leido es menor o igual a 550 y mayor o igual a 450 } Serial.println(val1); if(var7<=550&&var7>=450){ Serial.println("izquierda"); if(val1>0){ val1=val1-5; Serial.println(val1); ServoDos.write(val1); delay(50); } } //--------------------- //Enciende o apaga el electroiman //Si el valor leido es menor o igual a 800 y mayor o igual a 650 if (var7<=800&&var7>=650) { var7 = analogRead(7);//Leemos el estado del botón nuevamente, lo asignamos a var7 if(estado ==0){//Si la variable estado es igual a 0 se cumple esta condición Serial.print("Electroimán activado"); digitalWrite(magneto, HIGH); estado =1;//Asignamos el valor 1 a la variable "estado" } else{ Serial.print("Electroimán desactivado"); digitalWrite(magneto, LOW); estado =0;//Asignamos el valor 0 a la variable "estado" } //Si el valor leido es menor o igual a 800 y mayor o igual a 650 while(var7<=800&&var7>=650){ var7 = analogRead(7);//Se cumple esta condición mientras esté precionado el botón } } } |
SuperMec 5

¿Que es Arduino Romeo?
La familia Romeo es un placa de control de robotica Todo-En-Uno, especialmente diseñado para aplicaciones de robótica de DFRobot. Se beneficia de la plataforma de código abierto Arduino , es compatible con miles de códigos y puede ampliarse fácilmente con los escudos de Arduino. El controlador del motor CC de 2 vías integrado y el zócalo inalámbrico le permiten iniciar su propio proyecto de robotica inmediatamente sin la necesidad de un driver de motor adicional. No solo tiene el controlador del motor, Romeo también está diseñado para tener potencia extra para los servos que necesitan más corriente.
Romeo también se presenta con el estándar 3 Pin-out de DFRobot diseñado y compatible con los sensores y actuadores de la serie Gravity . Cientos de sensores ahora son plug-play con Romeo.
ESPECIFICACIONES
- Suministro de CC: alimentado por USB o externo de 7V ~ 12V DC
- Salida de CC: 5V / 3.3V DC y salida de potencia externa
- Microcontrolador: Atmega328
- Cargador de arranque: Arduino Uno
- Compatible con el mapeo de pin Arduino Uno
- 8 canales de E/S analógicas de 10 bits
- interfaz USB
- 5 teclas de entradas
- Detección automática / entrada de potencia de conmutación
- Encabezado ICSP para la descarga directa del programa
- Serial Interface TTL Level
- Soporte de encabezado macho y hembra
- Sockets integrados para el módulo RF APC220 y el módulo DF-Bluetooth
- Tres juegos de patillas de interfaz I2C (dos cabezales de patillas de 90 °)
- Driver de motor de dos vías con corriente máxima 2A
- Placa enchapado en oro
- Tamaño: 90x80x14mm (3,54 «x3.15» x0.55 «)
- Peso: 60 gramos
RoMeo Pinout

Placa
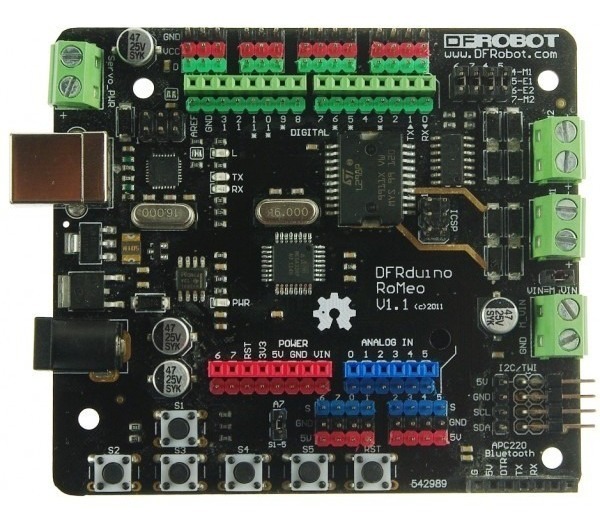
La imagen de arriba muestra todas las líneas y conectores de E / S en el Romeo, que incluye:
- Un terminal de entrada de potencia de motor regulado (6v a 12v)
- Un Terminal de entrada de alimentación servo no regulada (se suministra regulada de 4 v a 7.2 v)
- Un puente de selección de potencia de entrada Servo
- Un encabezado de módulo de interfaz serie para el módulo APC220 / Bluetooth
- Dos terminales de motor CC: maneja la corriente del motor hasta 2A, en cada terminal
- Un puerto I2C / TWI – SDA, SCL, 5V, GND
- Un puerto analógico con 8 entradas analógicas – La entrada analógica 7 estará ocupada al conectar al puente «A7»
- Un puerto I / O de propósito general con 13 líneas de E / S – 4,5,6,7 se puede usar para controlar motores
- Un botón de reinicio
- Jumper para habilitar / deshabilitar el control del motor
Antes de empezar
Aplicando potencia
Este es uno de los pasos más importantes antes de usarl Romeo y comunicarse con su controlador host. DEBE asegurarse de que aplique energía al terminal de alimentación con la polaridad correcta. La polaridad invertida dañará al Romeo.
Energía desde el puerto USB: simplemente conecte el cable USB, y Romeo puede funcionar. Tenga en cuenta que el USB solo puede suministrar corriente de 500 mA. Debería ser capaz de cumplir con la mayoría de los requisitos para la aplicación de iluminación LED. Sin embargo, no es suficiente para alimentar motores de CC o servo.
Alimentación de la entrada de potencia del motor: Simplemente conecte el cable de tierra a la bornera con la etiqueta «GND», y luego conecte el cable positivo a la bornera con la etiqueta «VIN».
NOTA: la tensión de alimentación máxima no puede exceder 14V CC.
Software
RoMeo puede ser programado por el IDE de Arduino. Se puede descargar en Arduino.cc , seleccione «Arduino UNO» como hardware.
Servo Power Select Jumper
Como la mayoría de los servos utilizan más corriente que la fuente de alimentación USB puede suministrar. Se proporciona un terminal de alimentación para alimentar el servo individualmente. Esta opción puede habilitarse / deshabilitarse mediante el puente de selección Servo Power.
Cuando se aplica el Servo Power Select Jumper, el servo funciona con 5V internos.
Cuando el Servo Power Select Jumper no se aplica, el servo está alimentado por una fuente de alimentación externa.
El Romeo V1.3 utiliza un conmutador automático para la selección de la fuente de alimentación. Cuando se haya aplicado la fuente de alimentación externa, el servo se alimentará automáticamente mediante la alimentación externa en lugar de la energía del USB.
Jumper Pin de control del motor
La aplicación de los jumper de control del motor asignará el Pin 5,6,7,8 para el control del motor.
Al quitar los puentes se liberarán los pines anteriores, y el controlador del motor se desactivará.
Botones
RoMeo tiene 5 botones S1-S5 (Figura 2). S1-S5 usa la entrada analógica del pin 7,
| Alfiler | Función |
|---|---|
| Pin analógico 7 | Botón S1-S5 |

Fig2: botones de Romeo
Ejemplo de uso de botones 1-5
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 |
// char msgs[5][15] = { "Right Key OK ", "Up Key OK ", "Down Key OK ", "Left Key OK ", "Select Key OK" }; char start_msg[15] = { "Start loop "}; int adc_key_val[5] ={ 30, 150, 360, 535, 760 }; int NUM_KEYS = 5; int adc_key_in; int key=-1; int oldkey=-1; void setup() { pinMode(13, OUTPUT); //we'll use the debug LED to output a heartbeat Serial.begin(9600); /* Print that we made it here */ Serial.println(start_msg); } void loop() { adc_key_in = analogRead(7); // read the value from the sensor digitalWrite(13, HIGH); /* get the key */ key = get_key(adc_key_in); // convert into key press if (key != oldkey) { // if keypress is detected delay(50); // wait for debounce time adc_key_in = analogRead(7); // read the value from the sensor key = get_key(adc_key_in); // convert into key press if (key != oldkey) { oldkey = key; if (key >=0){ Serial.println(adc_key_in, DEC); Serial.println(msgs[key]); } } } digitalWrite(13, LOW); } // Convert ADC value to key number int get_key(unsigned int input) { int k; for (k = 0; k < NUM_KEYS; k++) { if (input < adc_key_val[k]) { return k; } } if (k >= NUM_KEYS) k = -1; // No valid key pressed return k; } |
Control de velocidad de motor doble de CC
Configuración de hardware
Conecte los cuatro cables del motor al terminal del motor de Romeo. Y aplique energía a través del terminal de potencia del motor (Figura 4).

Fig4: Diagrama de conexión de motor de Romeo
Asignación de pines
| PIN | Función |
|---|---|
| Digital 4 | Motor 1 Control de dirección |
| Digital 5 | Motor 1 control PWM |
| Digital 6 | Motor 2 PWM control |
| Digital 7 | Motor 2 Control de dirección |
| Pin | Función |
|---|---|
| Digital 4 | Motor 1 Habilitar control |
| Digital 5 | Motor 1 Control de dirección |
| Digital 6 | Motor 2 Control de dirección |
| Digital 7 | Motor 2 Habilitar control |
Modo de control PWM

Fig4: Asignación de clavijas de control del motor PWM
El control del motor PWM CC se implementa mediante la manipulación de dos pines E/S digitales y dos pines PWM. Como se ilustra en el diagrama de arriba (Figura 5), el Pin 4,7 (7,8 para la versión antigua de Romeo) son pasadores de control de la dirección del motor, Pin 5,6 (6,9 para la versión antigua de Romeo) son pasadores de control de velocidad del motor.
Para la placa Romeo anterior, los pines utilizados para controlar el motor son Pin 7,8 (Dirección), Pin 6,9 (Velocidad). Puede encontrar la información en el lado derecho de los puentes de control del motor.
Código de ejemplo:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 |
//Standard PWM DC control int E1 = 5; //M1 Speed Control int E2 = 6; //M2 Speed Control int M1 = 4; //M1 Direction Control int M2 = 7; //M1 Direction Control ///For previous Romeo, please use these pins. //int E1 = 6; //M1 Speed Control //int E2 = 9; //M2 Speed Control //int M1 = 7; //M1 Direction Control //int M2 = 8; //M1 Direction Control void stop(void) //Stop { digitalWrite(E1,LOW); digitalWrite(E2,LOW); } void advance(char a,char b) //Move forward { analogWrite (E1,a); //PWM Speed Control digitalWrite(M1,HIGH); analogWrite (E2,b); digitalWrite(M2,HIGH); } void back_off (char a,char b) //Move backward { analogWrite (E1,a); digitalWrite(M1,LOW); analogWrite (E2,b); digitalWrite(M2,LOW); } void turn_L (char a,char b) //Turn Left { analogWrite (E1,a); digitalWrite(M1,LOW); analogWrite (E2,b); digitalWrite(M2,HIGH); } void turn_R (char a,char b) //Turn Right { analogWrite (E1,a); digitalWrite(M1,HIGH); analogWrite (E2,b); digitalWrite(M2,LOW); } void setup(void) { int i; for(i=4;i<=7;i++) pinMode(i, OUTPUT); Serial.begin(19200); //Set Baud Rate Serial.println("Run keyboard control"); } void loop(void) { if(Serial.available()){ char val = Serial.read(); if(val != -1) { switch(val) { case 'w'://Move Forward advance (255,255); //move forward in max speed break; case 's'://Move Backward back_off (255,255); //move back in max speed break; case 'a'://Turn Left turn_L (100,100); break; case 'd'://Turn Right turn_R (100,100); break; case 'z': Serial.println("Hello"); break; case 'x': stop(); break; } } else stop(); } } |
Modo de control PLL
Romeo también es compatible con oscilador enganchado en fase (PLL)

Fig5: Configuración de asignación de patillas de control del motor PLL
Código de muestra:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 |
//Standard DLL Speed control int E1 = 4; //M1 Speed Control int E2 = 7; //M2 Speed Control int M1 = 5; //M1 Direction Control int M2 = 6; //M1 Direction Control ///For previous Romeo, please use these pins. //int E1 = 6; //M1 Speed Control //int E2 = 9; //M2 Speed Control //int M1 = 7; //M1 Direction Control //int M2 = 8; //M1 Direction Control //When m1p/m2p is 127, it stops the motor //when m1p/m2p is 255, it gives the maximum speed for one direction //When m1p/m2p is 0, it gives the maximum speed for reverse direction void DriveMotorP(byte m1p, byte m2p)//Drive Motor Power Mode { digitalWrite(E1, HIGH); analogWrite(M1, (m1p)); digitalWrite(E2, HIGH); analogWrite(M2, (m2p)); } void setup(void) { int i; for(i=6;i<=9;i++) pinMode(i, OUTPUT); Serial.begin(19200); //Set Baud Rate } void loop(void) { if(Serial.available()){ char val = Serial.read(); if(val!=-1) { switch(val) { case 'w'://Move Forward DriveMotorP(0xff,0xff); // Max speed break; case 'x'://Move Backward DriveMotorP(0x00,0x00); ; // Max speed break; case 's'://Stop DriveMotorP(0x7f,0x7f); break; } } } } |
SUSCRIBETE A NUESTROS BOLETINES, RECIBE EN TU CORREO LAS NOTICIAS MÁS DESTACADAS, SÓLO INGRESANDO TU CORREO ELECTRÓNICO
[wysija_form id=”1″]
VIDEO RECOMENDADO