Los robots más avanzados de hoy en día pueden llevar a cabo misiones espaciales, resolver el cubo de Rubik, ordenar medicamentos por clases o incluso hacer tortitas. Pero la mayoría no es capaz de realizar el simple acto de agarrar un lápiz y darle vueltas hasta sujetarlo del modo más estable posible.
Las tareas complicadas que requieren una manipulación diestra con las manos, como enrollar, girar, doblar (imprescindible al plegar ropa), notar la fricción y otras cosas que los humanos hacemos o percibimos sin esfuerzo, han demostrado ser notablemente difíciles para los robots.
Ahora, unos robotistas de la Universidad de Washington, en la ciudad estadounidense de Seattle, han construido una mano robótica que no solo puede realizar manipulaciones diestras sino también aprender de su propia experiencia sin necesidad de que los humanos la instruyamos. No ha faltado quien ha apodado a este fascinante dispositivo robótico como “la primera mano de un Terminator”.
El equipo de Emo Todorov y Vikash Kumar se pasó años construyendo una de las manos robóticas de cinco dedos más altamente cualificadas del mundo. Después, desarrollaron un modelo digital preciso para simulaciones que permite a un ordenador analizar los movimientos en tiempo real. En su demostración más reciente, aplican el modelo al sistema y a tareas cotidianas como hacer rotar entre los dedos a un objeto alargado.
Con cada intento, la mano robótica aumenta progresivamente su destreza a la hora de hacer girar el tubo, gracias a los algoritmos de aprendizaje automático que la ayudan tanto a modelar la física básica implicada como a planear qué acciones debería realizar para alcanzar el resultado deseado.
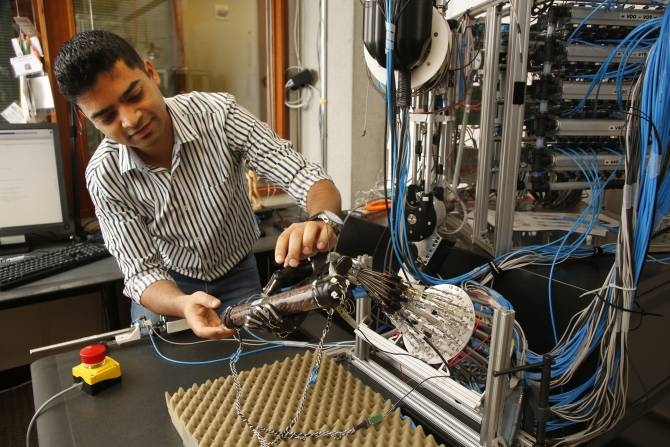
![[Img #35828]](http://noticiasdelaciencia.com/upload/img/periodico/img_35828.jpg "Vikash Kumar trabajando en la nueva mano robótica. (Foto: University of Washington)")
Este método de aprendizaje autónomo desarrollado por el Laboratorio del Control de Movimiento de la citada universidad contrasta con la estrategia subyacente en muchas demostraciones robóticas, que precisan la labor previa de personas programando cada movimiento individual de la mano del robot para poder completar una única tarea.
En tales casos, los ingenieros observan un movimiento de una mano humana y tratan de determinar qué se necesita exactamente para reproducirlo en una mano robótica. Tal como argumenta Todorov, es casi como producir una película animada; el movimiento parece natural y espontáneo, pero hay un ejército de animadores detrás ajustándolo. Lo que el equipo de Todorov y Kumar está usando es un enfoque universal que permite al robot aprender de sus propios movimientos y que no necesita los ajustes de ningún humano.
Tal vez pueda interesarte proyectos en IOT, raspberry pi, arduino, pic, robótica, telecomunicaciones, suscribete en http://www.youtube.com/user/carlosvolt?sub_confirmation=1 mucho videos con código fuentes completos y diagramas.
uno apremde
Así es, estimado, saludos y gracias por comentar