
En construcción…
En este tutorial veremos como crear un control remoto con arduino mini pro para el robot Rover 5
Puede adquirir este producto en la tienda de DFRobot https://www.dfrobot.com/product-57.html?search=apc220
![]()
Introducción
El módulo de datos de radio APC220 es una solución de radio de alta potencia y muy versátil, es fácil de configurar e integrar en cualquier proyecto que requiera un enlace de RF inalámbrico. Es perfecto para aplicaciones robóticas si necesita control inalámbrico. Puede conectar uno de estos Los módulos con su MCU a través de la interfaz TTL, y se conectan a su PC con otro módulo APC220 a través de un convertidor TTL / USB.
Especificación
- Frecuencia de trabajo: 420 MHz a 450 MHz
- Potencia: 3.5-5.5V
- Corriente: <25-35mA
- Temperatura de trabajo: -20 ° C ~ + 70 ° C
- Alcance: línea de visión de 1200 m (1200 bps)
- Interfaz: UART / TTL
- Velocidad de transmisión: 1200-19200 bps
- Velocidad de transmisión (aire): 1200-19200 bps
- Buffer de recepción: 256 bytes
- Tamaño: 37mm × 17 mm × 6.6mm
- Peso: 30 g
Tal vez pueda interesarte proyectos en arduino, pic, robótica, telecomunicaciones, suscribete en http://www.youtube.com/user/carlosvolt?sub_confirmation=1 mucho videos con código fuentes completos y diagramas

PinOut
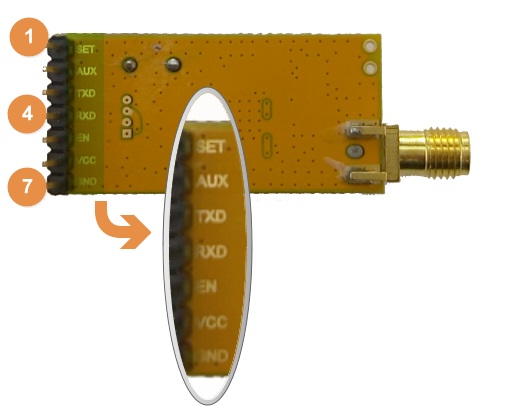
| Pin | Definicion | Detalle |
|---|---|---|
| 1 | SET | Establecer parámetros (bajo) |
| 2 | AUX | Señal UART- Transmisión (baja) Transmisión (alta) |
| 3 | TXD | UART TX |
| 4 | RXD | UART RX |
| 5 | ES | Desactive el dispositivo cuando aplique <0,5 V. Habilite el dispositivo cuando lo deje desconectado o aplique> 1,6 V |
| 6 | VCC | 3.3V-5.5V de potencia |
| 7 | GND | Tierra 0V |
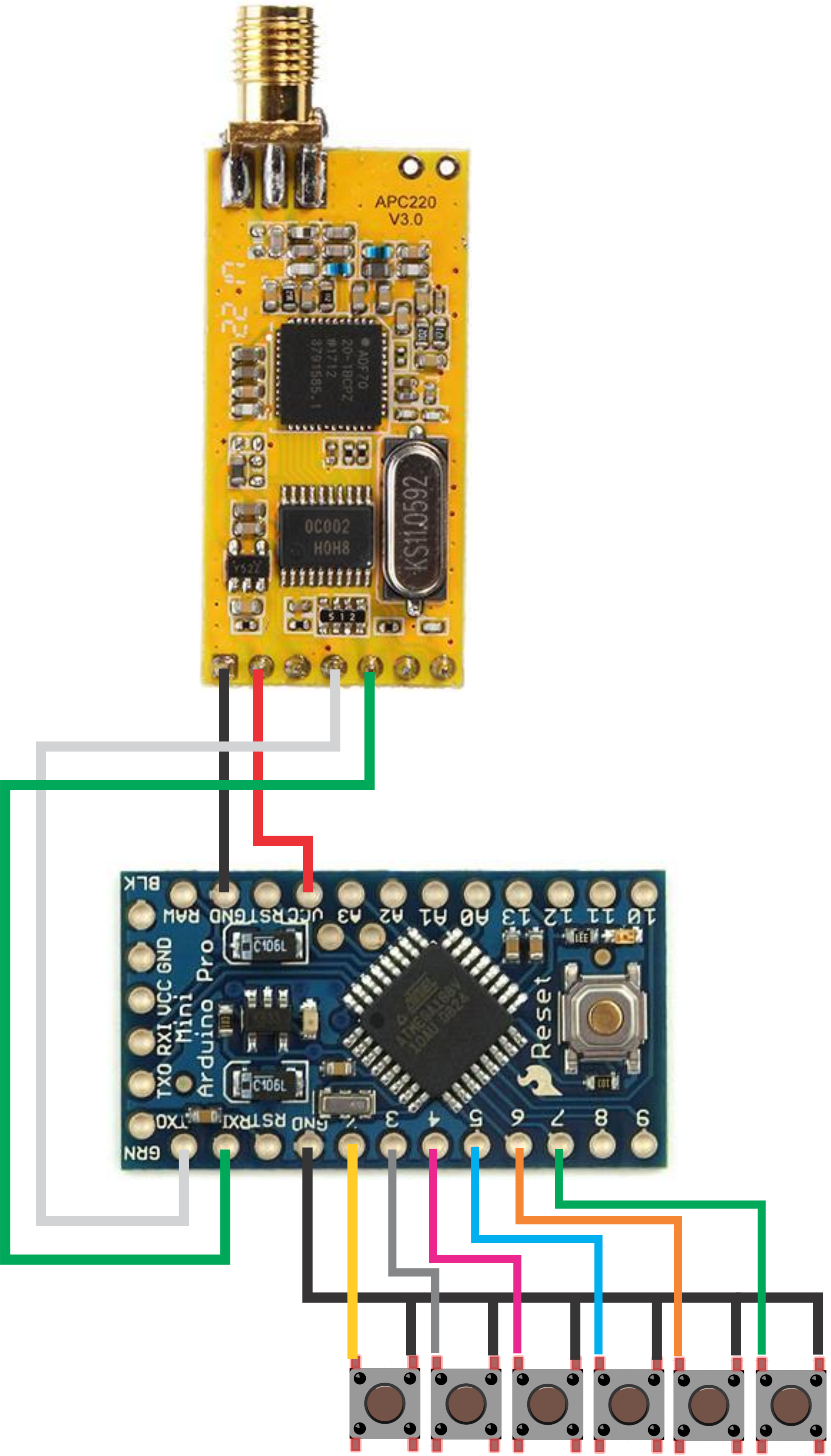
Circuito
Código Fuente
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 |
//declaración de variables int pul2 = 0; int pul3 = 0; int pul4 = 0; int pul5 = 0; int pul6 = 0; int pul7 = 0; int estado = 0; void setup() { Serial.begin(9600);//Velocidad del puerto serial pinMode(2, INPUT_PULLUP); pinMode(3, INPUT_PULLUP); pinMode(4, INPUT_PULLUP); pinMode(5, INPUT_PULLUP); pinMode(6, INPUT_PULLUP); pinMode(7, INPUT_PULLUP); } void loop() { //Lectura de botones pul2 = digitalRead(2); pul3 = digitalRead(3); pul4 = digitalRead(4); pul5 = digitalRead(5); pul6 = digitalRead(6); pul7 = digitalRead(7); //Gira los motores para ir hacia adelante if (pul2 == LOW) {//Si el pulsador 2 está precionado se cumple esta condición pul2 = digitalRead(2);//Leemos el estado del botón nuevamente Serial.println("mot1 255");// Enviamos esta cadena de caracteres x el puerto serial while(pul2 == LOW){//Se cumple esta condición mientras esté precionado el botón pul2 = digitalRead(2);//Lectura del pulsador, para ver si lo seguirmos precionando } Serial.println("mot1 0");//Se envía esta cadena si soltamos el botón } //Gira los motores para doblar en una dirección if (pul3 == LOW) { pul3 = digitalRead(3); Serial.println("mot2 255"); while(pul3 == LOW){ pul3 = digitalRead(3); } Serial.println("mot2 0"); } //Gira los motores para doblar en la otra dirección if (pul4 == LOW) { pul4 = digitalRead(4); Serial.println("mot3 255"); while(pul4 == LOW){ pul4 = digitalRead(4); } Serial.println("mot3 0"); } //Gira los motores para ir hacia atrás if (pul5 == LOW) { pul5 = digitalRead(5); Serial.println("mot4 255"); while(pul5 == LOW){ pul5 = digitalRead(5); } Serial.println("mot4 0"); } //Activa la bocina o claxon mientras se aprieta el botón if (pul6 == LOW) { pul6 = digitalRead(6); Serial.println("claxon 255"); while(pul6 == LOW){ pul6 = digitalRead(6); } Serial.println("claxon 0"); } //Enciende o apaga la luz if (pul7 == LOW) {//Si el pulsador 7 está precionado se cumple esta condición pul7 = digitalRead(7);//Leemos el estado del botón nuevamente if(estado ==0){//Si la variable estado es igual a 0 se cumple esta condición Serial.println("luz 255");// Enviamos esta cadena de caracteres x el puerto serial para encender la luz estado =1;//Asignamos el valor 1 a la variable "estado" } else{ Serial.println("luz 0");//Enviamos esta cadena para apagar la luz estado =0; } while(pul7 == LOW){ pul7 = digitalRead(7);//Se cumple esta condición mientras esté precionado el botón } } delay(50); } |
Descargar RF-Magic
Datasheet
Ejecutar APC22X_V12A.exe (RF-Magic) como administrador si su sistema no es Windows XP.

NOTA : en el software reconocerá el módulo APC220 y puerto serie COMX automáticamente una vez que la abrimos. Revisar en el Administrador de dispositivos para verificar el puerto COM correcto.
Configure RF-magic como en el marco cuadrado rojo a continuación (configuración predeterminada), y haga clic en Escribir W para escribir su configuración, luego haga clic en Leer R para leer los parámetros que ha establecido.

Configuración

Configuración de escritura y lectura
| Parámetro | Rango | Predeterminado |
|---|---|---|
| Frecuencia de RF | Resolución 1KHz, precisión ± 100Hz | 434MHz |
| Tasa RF TRx | 1200, 2400, 4800, 9600, 19200 bps | 9600bps |
| Potencia de RF | 0-9 | 9 |
| Tasa de serie | 1200, 2400, 4800, 9600, 19200, 38400, 57600bps | 9600bps |
| ID NETO | 0-65535 (16 bits) | 12345 |
| ID DE NODO | 123456789012 | |
| Serie Patity | Deshabilitar, la extraña Patity, incluso Patity | Deshabilitar |
Configure el otro módulo APC220 de la misma manera, con la misma configuración de parámetros.
SUSCRIBETE A NUESTROS BOLETINES, RECIBE EN TU CORREO LAS NOTICIAS MÁS DESTACADAS, SÓLO INGRESANDO TU CORREO ELECTRÓNICO
[wysija_form id=”1″]
VIDEOS RECOMENDADOS