
En este tutorial veremos como fabricar un circuito POV Veremos como armar el circuito, analizaremos el código fuente paso a paso, y finamente testearemos todo el dispositivo para comprobar su funcionamiento.
Tal vez pueda interesarte proyectos en arduino, pic, robótica, telecomunicaciones, suscribete en http://www.youtube.com/user/carlosvolt?sub_confirmation=1 mucho videos con código fuentes completos y diagramas

Componentes electrónicos
Un resistor de 1K

Once resistores de 220 ohm a 1K

Un sensor Hall

Arduino nano

El Arduino Nano es una placa pequeña, completa y compatible con la placa de pruebas basada en el ATmega328 (Arduino Nano 3.x). Tiene más o menos la misma funcionalidad del Arduino Duemilanove, pero en un paquete diferente. Solo carece de un conector de alimentación de CC y funciona con un cable USB Mini-B en lugar de uno estándar.
| Microcontrolador | ATmega328 |
| Arquitectura | AVR |
| Tensión de funcionamiento | 5 V |
| Memoria flash | 32 KB de los cuales 2 KB utiliza el gestor de arranque |
| SRAM | 2 KB |
| Velocidad de reloj | 16 MHz |
| Pines analógicos IN | 8 |
| EEPROM | 1 KB |
| Corriente CC por pines de E / S | 40 mA (pines de E / S) |
| Voltaje de entrada | 7-12 V |
| Pines de E / S digitales | 22 (6 de los cuales son PWM) |
| Salida PWM | 6 |
| El consumo de energía | 19 mA |
| Tamaño de PCB | 18 x 45 mm |
| Peso | 7 g |
Diagrama de pines

Módulo bluetooth HC-05
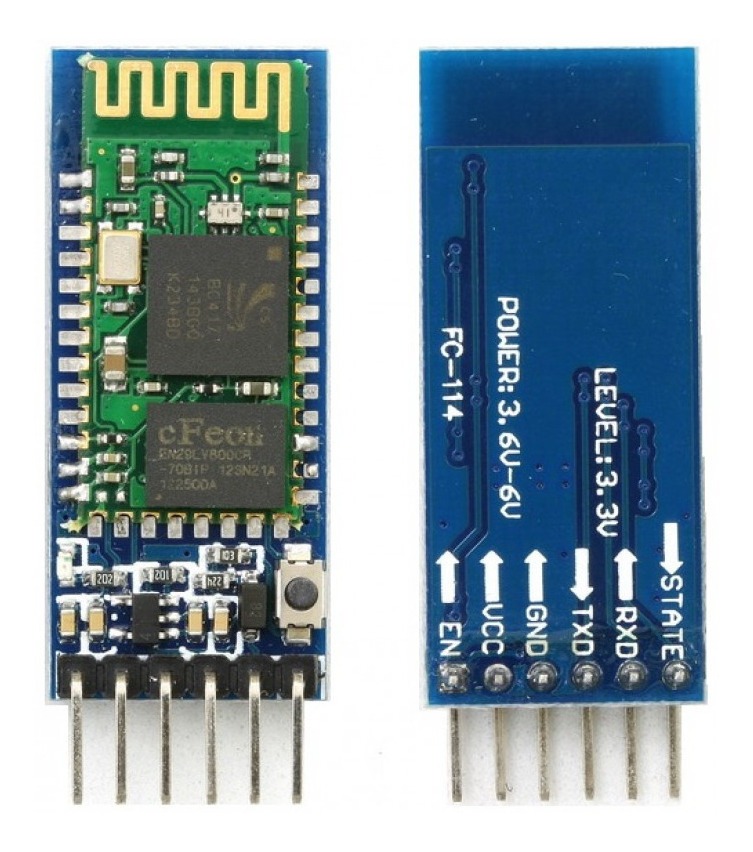
- Funciona como dispositivo maestro y esclavo bluetooth
- Configurable mediante comandos AT
- Bluetooth V2.0+EDR
- Frecuencia de operación: 2.4 GHz Banda ISM
- Modulación: GFSK (Gaussian Frequency Shift Keying)
- Potencia de transmisión: <=4dBm, Class 2
- Sensibilidad: <=-84dBm @ 0.1% BER
- Seguridad: Autenticación y encriptación
- Perfiles Bluetooth: Puerto serie bluetooth.
- Distancia de hasta 10 metros en condiciones óptimas
- Voltaje de Operación: 3.6 VDC a 6 VDC
- Consumo Corriente: 30 mA a 50mA
- Chip: BC417143
- Versión o firmware: 3.0-20170609
- Baudios por defecto: 38400
- Baudios soportados: 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200.
- Interfaz: Serial TTL
- Antena: Integrada en el PCB
- Seguridad: Autenticación y encriptación (Contraseña por defecto: 0000 o 1234)
- Temperatura de trabajo (Max): 75°C
- Temperatura de trabajo (Min): -20°C
- Dimensiones: 4.4 x 1.6 x 0.7 cm
Pines hembra

Imán de neodimio

Un Jumper

Once led colores a elección

Un motoreductor con rueda

Una batería de 9 voltios

Pines machos

Un zócalo para el arduino

Diagrama electrónico

PCB


Descargar un archivo gerber –>pov_duino
Código Fuente
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 |
#include <TimeLib.h> const int pinesLed[] = {12,11,10,9,8,7,6,5};//Pines de salida int filas= 8; const int alto = 8; const int ancho = 5; const int sensorHall = 13;//Pin 13 para el sensor efecto Hall int i; String tString; String cadena; const unsigned char caracteres[95][5] = { {0x00,0x00,0x00,0x00,0x00}, // 0x20 32 {0x00,0x00,0x6f,0x00,0x00}, // ! 0x21 33 {0x00,0x07,0x00,0x07,0x00}, // " 0x22 34 {0x14,0x7f,0x14,0x7f,0x14}, // # 0x23 35 {0x00,0x07,0x04,0x1e,0x00}, // $ 0x24 36 {0x23,0x13,0x08,0x64,0x62}, // % 0x25 37 {0x36,0x49,0x56,0x20,0x50}, // & 0x26 38 {0x00,0x00,0x07,0x00,0x00}, // ' 0x27 39 {0x00,0x1c,0x22,0x41,0x00}, // ( 0x28 40 {0x00,0x41,0x22,0x1c,0x00}, // ) 0x29 41 {0x14,0x08,0x3e,0x08,0x14}, // * 0x2a 42 {0x08,0x08,0x3e,0x08,0x08}, // + 0x2b 43 {0x00,0x50,0x30,0x00,0x00}, // , 0x2c 44 {0x08,0x08,0x08,0x08,0x08}, // - 0x2d 45 {0x00,0x60,0x60,0x00,0x00}, // . 0x2e 46 {0x20,0x10,0x08,0x04,0x02}, // / 0x2f 47 {0x3e,0x51,0x49,0x45,0x3e}, // 0 0x30 48 {0x00,0x42,0x7f,0x40,0x00}, // 1 0x31 49 {0x42,0x61,0x51,0x49,0x46}, // 2 0x32 50 {0x21,0x41,0x45,0x4b,0x31}, // 3 0x33 51 {0x18,0x14,0x12,0x7f,0x10}, // 4 0x34 52 {0x27,0x45,0x45,0x45,0x39}, // 5 0x35 53 {0x3c,0x4a,0x49,0x49,0x30}, // 6 0x36 54 {0x01,0x71,0x09,0x05,0x03}, // 7 0x37 55 {0x36,0x49,0x49,0x49,0x36}, // 8 0x38 56 {0x06,0x49,0x49,0x29,0x1e}, // 9 0x39 57 {0x00,0x36,0x36,0x00,0x00}, // : 0x3a 58 {0x00,0x56,0x36,0x00,0x00}, // ; 0x3b 59 {0x08,0x14,0x22,0x41,0x00}, // < 0x3c 60 {0x14,0x14,0x14,0x14,0x14}, // = 0x3d 61 {0x00,0x41,0x22,0x14,0x08}, // > 0x3e 62 {0x02,0x01,0x51,0x09,0x06}, // ? 0x3f 63 {0x3e,0x41,0x5d,0x49,0x4e}, // @ 0x40 64 {0x7e,0x09,0x09,0x09,0x7e}, // A 0x41 65 {0x7f,0x49,0x49,0x49,0x36}, // B 0x42 66 {0x3e,0x41,0x41,0x41,0x22}, // C 0x43 67 {0x7f,0x41,0x41,0x41,0x3e}, // D 0x44 68 {0x7f,0x49,0x49,0x49,0x41}, // E 0x45 69 {0x7f,0x09,0x09,0x09,0x01}, // F 0x46 70 {0x3e,0x41,0x49,0x49,0x7a}, // G 0x47 71 {0x7f,0x08,0x08,0x08,0x7f}, // H 0x48 72 {0x00,0x41,0x7f,0x41,0x00}, // I 0x49 73 {0x20,0x40,0x41,0x3f,0x01}, // J 0x4a 74 {0x7f,0x08,0x14,0x22,0x41}, // K 0x4b 75 {0x7f,0x40,0x40,0x40,0x40}, // L 0x4c 76 {0x7f,0x02,0x0c,0x02,0x7f}, // M 0x4d 77 {0x7f,0x04,0x08,0x10,0x7f}, // N 0x4e 78 {0x3e,0x41,0x41,0x41,0x3e}, // O 0x4f 79 {0x7f,0x09,0x09,0x09,0x06}, // P 0x50 80 {0x3e,0x41,0x51,0x21,0x5e}, // Q 0x51 81 {0x7f,0x09,0x19,0x29,0x46}, // R 0x52 82 {0x46,0x49,0x49,0x49,0x31}, // S 0x53 83 {0x01,0x01,0x7f,0x01,0x01}, // T 0x54 84 {0x3f,0x40,0x40,0x40,0x3f}, // U 0x55 85 {0x0f,0x30,0x40,0x30,0x0f}, // V 0x56 86 {0x3f,0x40,0x30,0x40,0x3f}, // W 0x57 87 {0x63,0x14,0x08,0x14,0x63}, // X 0x58 88 {0x07,0x08,0x70,0x08,0x07}, // Y 0x59 89 {0x61,0x51,0x49,0x45,0x43}, // Z 0x5a 90 {0x3c,0x4a,0x49,0x29,0x1e}, // [ 0x5b 91 {0x02,0x04,0x08,0x10,0x20}, // \ 0x5c 92 {0x00,0x41,0x7f,0x00,0x00}, // ] 0x5d 93 {0x04,0x02,0x01,0x02,0x04}, // ^ 0x5e 94 {0x40,0x40,0x40,0x40,0x40}, // _ 0x5f 95 {0x00,0x00,0x03,0x04,0x00}, // ` 0x60 96 {0x20,0x54,0x54,0x54,0x78}, // a 0x61 97 {0x7f,0x48,0x44,0x44,0x38}, // b 0x62 98 {0x38,0x44,0x44,0x44,0x20}, // c 0x63 99 {0x38,0x44,0x44,0x48,0x7f}, // d 0x64 100 {0x38,0x54,0x54,0x54,0x18}, // e 0x65 101 {0x08,0x7e,0x09,0x01,0x02}, // f 0x66 102 {0x0c,0x52,0x52,0x52,0x3e}, // g 0x67 103 {0x7f,0x08,0x04,0x04,0x78}, // h 0x68 104 {0x00,0x44,0x7d,0x40,0x00}, // i 0x69 105 {0x20,0x40,0x44,0x3d,0x00}, // j 0x6a 106 {0x00,0x7f,0x10,0x28,0x44}, // k 0x6b 107 {0x00,0x41,0x7f,0x40,0x00}, // l 0x6c 108 {0x7c,0x04,0x18,0x04,0x78}, // m 0x6d 109 {0x7c,0x08,0x04,0x04,0x78}, // n 0x6e 110 {0x38,0x44,0x44,0x44,0x38}, // o 0x6f 111 {0x7c,0x14,0x14,0x14,0x08}, // p 0x70 112 {0x08,0x14,0x14,0x18,0x7c}, // q 0x71 113 {0x7c,0x08,0x04,0x04,0x08}, // r 0x72 114 {0x48,0x54,0x54,0x54,0x20}, // s 0x73 115 {0x04,0x3f,0x44,0x40,0x20}, // t 0x74 116 {0x3c,0x40,0x40,0x20,0x7c}, // u 0x75 117 {0x1c,0x20,0x40,0x20,0x1c}, // v 0x76 118 {0x3c,0x40,0x30,0x40,0x3c}, // w 0x77 119 {0x44,0x28,0x10,0x28,0x44}, // x 0x78 120 {0x0c,0x50,0x50,0x50,0x3c}, // y 0x79 121 {0x44,0x64,0x54,0x4c,0x44}, // z 0x7a 122 {0x00,0x08,0x36,0x41,0x41}, // { 0x7b 123 {0x00,0x00,0x7f,0x00,0x00}, // | 0x7c 124 {0x41,0x41,0x36,0x08,0x00}, // } 0x7d 125 {0x04,0x02,0x04,0x08,0x04}, // ~ 0x7e 126 }; void setup() { Serial.begin(9600);// Esta velocidad debe ser igual a la del módulo bluetooth setTime(23,30,00,12,12,2021);//Seteo de la hora y fecha pinMode(13, INPUT);//Pin del sensor Hall como entrada //Se configuran todos los pines como salidas donde iran los led for (i = 0; i < filas; i++) pinMode(pinesLed[i], OUTPUT); } void loop() { //Obtenemos y almacenamos los caracteres obtenidos del módulo bluetooth if (Serial.available()) { cadena = String(""); while (Serial.available()) { cadena = cadena + char(Serial.read()); delay(1); } } String cadenaTxT = cadena; char almacenar[50]; cadenaTxT.toCharArray(almacenar, 50); tString=reloj(); tString=tString+" "; //Lectura del sensor hall para sincronizar el POV while(digitalRead(sensorHall) != 0) { digitalWrite(13, LOW); } digitalWrite(13, HIGH); //Imprimir letras y hora en el POV for (int k=0; k<tString.length(); k++){ imprimirLetra(tString.charAt(k)); } delay(2); for (int k=sizeof(cadenaTxT)-1; k>-1; k--){ imprimirLetraMay(cadenaTxT[k]); } } String reloj(){ String concatenar; String cadena1; String cadena2; String cadena3; if (hour() < 10) cadena1 = "0"+String(hour()); else cadena1 = String(hour()); if (minute() < 10) cadena2 = "0"+String(minute()); else cadena2 = String(minute()); if (second() < 10) cadena3 = "0"+String(second()); else cadena3 = String(second()); concatenar = cadena1+":"+cadena2+":"+cadena3; return concatenar; } void imprimirLetraMay(char car) { if (car < 32 || car > 126){ car = 32; } car -= 32; for (int i=ancho-1; i>-1; i--) { byte b = caracteres[car][i]; for (int j=0; j<alto; j++) { digitalWrite(pinesLed[j], bitRead(b,j)); } delay(1); } for (i = 0; i < filas; i++) digitalWrite(pinesLed[i] , LOW); delay(1); } void imprimirLetra(char car) { if (car < 32 || car > 126){ car = 32; } car -= 32; for (int i=0; i<ancho; i++) { byte b = caracteres[car][i]; for (int j=0; j<alto; j++) { digitalWrite(pinesLed[j], bitRead(b, 7-j)); } delay(1); } for (i = 0; i < filas; i++) digitalWrite(pinesLed[i] , LOW); delay(1); } |
Aplicación

Descargar app Bluetooth –> POV_BLUE_APP


PROYECTOS RECOMENDADOS