
En este tutorial veremos un circuito, que controla un motor paso a paso, con una aplicación hecha en app inventor, por medio de bluetooth, y el mo´dulo hc-05 y arduino.
No te pierdas ningún video más suscríbete a nuestro canal de telegram https://t.me/carlosvolt_electronica_robotica
Tal vez pueda interesarte proyectos en arduino, pic, robótica, telecomunicaciones, suscribete en http://www.youtube.com/user/carlosvolt?sub_confirmation=1 mucho videos con código fuentes completos y diagramas

Componentes electrónicos
Arduino mini pro
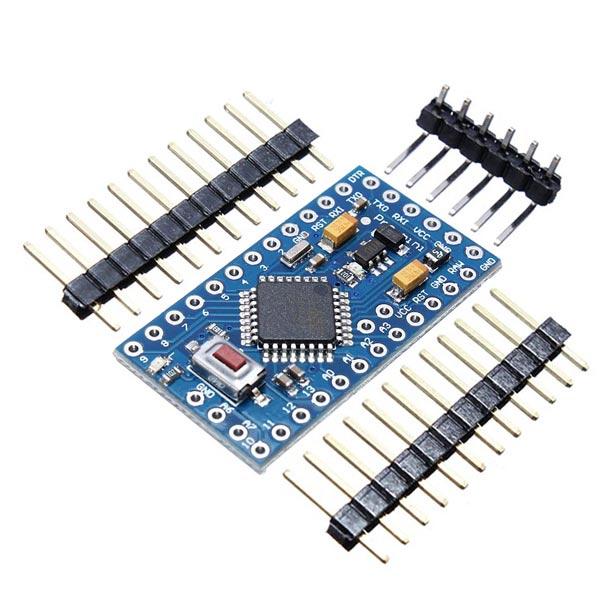
El Arduino Pro Mini es una placa de microcontrolador basada en el ATmega328 .
Tiene 14 pines de entrada / salida digital (de los cuales 6 se pueden usar como salidas PWM), 6 entradas analógicas, un resonador integrado, un botón de reinicio y orificios para montar encabezados de pines. Se puede conectar un encabezado de seis pines a un cable FTDI o una placa de conexión Sparkfun para proporcionar alimentación USB y comunicación a la placa.
El Arduino Pro Mini está diseñado para su instalación semipermanente en objetos o exposiciones. La placa viene sin encabezados pre montados, lo que permite el uso de varios tipos de conectores o la soldadura directa de cables. El diseño del pin es compatible con el Arduino Mini.
Hay dos versiones del Pro Mini. Uno corre a 3.3V y 8 MHz, el otro a 5V y 16 MHz.
| Microcontrolador | ATmega328 * |
| Fuente de alimentación de la placa | 3,35-12 V (modelo de 3,3 V) o 5-12 V (modelo de 5 V) |
| Voltaje de funcionamiento del circuito | 3.3V o 5V (dependiendo del modelo) |
| Pines de E / S digitales | 14 |
| Pines PWM | 6 6 |
| UART | 1 |
| SPI | 1 |
| I2C | 1 |
| Pines de entrada analógica | 6 6 |
| Interrupciones externas | 2 |
| Corriente CC por pin de E / S | 40 mA |
| Memoria flash | 32 KB de los cuales 2 KB utilizados por el gestor de arranque * |
| SRAM | 2 KB * |
| EEPROM | 1 KB * |
| Velocidad de reloj | 8 MHz (versiones de 3.3V) o 16 MHz (versiones de 5V) |
Módulos hc-05

- Funciona como dispositivo maestro y esclavo bluetooth
- Configurable mediante comandos AT
- Bluetooth V2.0+EDR
- Frecuencia de operación: 2.4 GHz Banda ISM
- Modulación: GFSK (Gaussian Frequency Shift Keying)
- Potencia de transmisión: <=4dBm, Class 2
- Sensibilidad: <=-84dBm @ 0.1% BER
- Seguridad: Autenticación y encriptación
- Perfiles Bluetooth: Puerto serie bluetooth.
- Distancia de hasta 10 metros en condiciones óptimas
- Voltaje de Operación: 3.6 VDC a 6 VDC
- Consumo Corriente: 30 mA a 50mA
- Chip: BC417143
- Versión o firmware: 3.0-20170609
- Baudios por defecto: 38400
- Baudios soportados: 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200.
- Interfaz: Serial TTL
- Antena: Integrada en el PCB
- Seguridad: Autenticación y encriptación (Contraseña por defecto: 0000 o 1234)
- Temperatura de trabajo (Max): 75°C
- Temperatura de trabajo (Min): -20°C
- Dimensiones: 4.4 x 1.6 x 0.7 cm
Motor paso a paso 28BYJ-48

Los parámetros de este motor paso a paso son:
- Modelo: 28BYJ-48 – 5V
- Tensión nominal: 5V (o 12 V, valor indicado en la parte trasera).
- Cantidad de fases: 4.
- Reductor de velocidad: 1/64
- Ángulo de paso: 5,625° / 64
- Frecuencia: 100Hz
- Resistencia en CC: 50Ω ±7 % (25° C)
- Frecuencia con tracción: > 600Hz
- Frecuencia sin tracción: > 1000Hz
- Torque con tracción: >34,3mN.m (120Hz)
- Torque en autoposicionamiento: >34,3mN.m
- Torque con fricción: 600-1200 gf.cm
- Arrastre en torque: 300 gf.cm
- Resistencia de aislación > 10MΩ (500V)
- Aislación eléctrica: 600VAC/1mA/1s
- Grado de aislación: A
- Aumento de temperatura: < 40K (120Hz)
- Ruido: < 35dB (120Hz, sin carga, 10cm)
ULN2003APG

Especificaciones principales:
- 500 mA de corriente de colector nominal (de salida única)
- 50 V de salida (hay una versión que soporta 100 V de salida)
- Incluye diodos de retorno de salida
- Entradas compatibles con TTL y 5-V CMOS lógica
Pines hembras

Pines macho

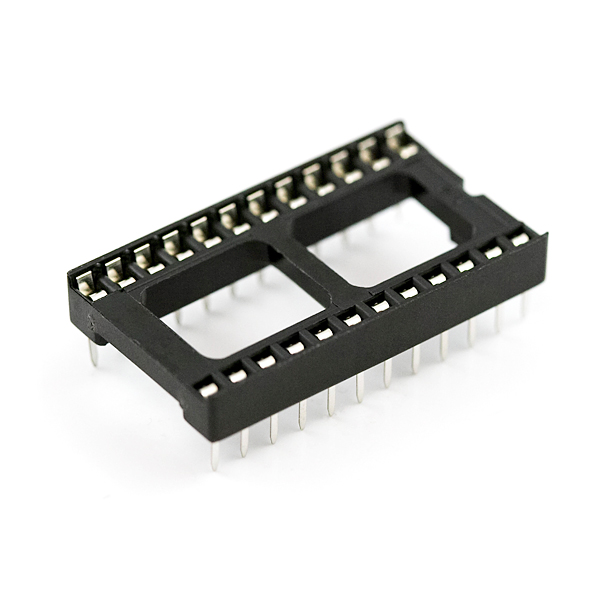
Un zócalo para arduino mini pro
Un capacitor de disco cerámico de 100 nF

Pines hembra a 90 grados

PCB

Descargar archivo gerber –> pcb motor paso a paso bluetooth
Código Fuente
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 |
#define pin2 2 #define pin3 3 #define pin4 4 #define pin5 5 #define retardo 2 char caracter; String cadena; float pasos = 0; int datos_serial = 0; void setup() { pinMode(pin2, OUTPUT); pinMode(pin3, OUTPUT); pinMode(pin4, OUTPUT); pinMode(pin5, OUTPUT); Serial.begin(57600); //Velocidad del módulo bluetooth } void loop() { while (Serial.available()) { delay(3); char c = Serial.read(); cadena += c; } if (cadena.length() >0) { Serial.println(cadena.toInt()); datos_serial = cadena.toInt(); } while(datos_serial>pasos){ atras(); delayMicroseconds(40); pasos = pasos + 1; } while(datos_serial<pasos){ adelante(); delayMicroseconds(40); pasos = pasos - 1; } if (cadena == "SET"){ pasos = 0; datos_serial = 0; } cadena=""; } void paso1(){ digitalWrite(pin2, HIGH); digitalWrite(pin3, HIGH); digitalWrite(pin4, LOW); digitalWrite(pin5, LOW); } void paso2(){ digitalWrite(pin2, LOW); digitalWrite(pin3, HIGH); digitalWrite(pin4, HIGH); digitalWrite(pin5, LOW); } void paso3(){ digitalWrite(pin2, LOW); digitalWrite(pin3, LOW); digitalWrite(pin4, HIGH); digitalWrite(pin5, HIGH); } void paso4(){ digitalWrite(pin2, HIGH); digitalWrite(pin3, LOW); digitalWrite(pin4, LOW); digitalWrite(pin5, HIGH); } void pasoApagado(){ digitalWrite(pin2, LOW); digitalWrite(pin3, LOW); digitalWrite(pin4, LOW); digitalWrite(pin5, LOW); } void adelante(){ paso1(); delay(retardo); paso2(); delay(retardo); paso3(); delay(retardo); paso4(); delay(retardo); } void atras(){ paso3(); delay(retardo); paso2(); delay(retardo); paso1(); delay(retardo); paso4(); delay(retardo); } |
Aplicación

Descargar aplicación y archivo fuente app inventor–> app motor paso a paso bluetooth
No te pierdas ningún video más suscríbete a nuestro canal de telegram https://t.me/carlosvolt_electronica_robotica