
El sensor detector de obstáculos KY-032 es un componente electrónico que se utiliza para detectar obstáculos en el camino y enviar una señal de retroalimentación a un microcontrolador o placa de desarrollo como Arduino. Es comúnmente utilizado en proyectos de robótica y en sistemas de automatización en los que se necesita detectar objetos en movimiento o en reposo.
Para utilizar el sensor KY-032, se necesita un microcontrolador o un Arduino, que permita la detección del sensor para interpretar los datos que se recogen y tomar decisiones en consecuencia. Es necesario conectar el sensor, mediante los pines de alimentación y salida al Arduino, siguiendo las especificaciones del fabricante.
El KY-032 cuenta con un emisor de infrarrojos y un receptor de luz que detecta la presencia de obstáculos en el camino. Cuando un objeto se encuentra cerca del sensor, el emisor de infrarrojos envía una señal de luz infrarroja, que rebota en el objeto y es detectada por el receptor. La intensidad de la señal detectada es proporcional a la distancia entre el sensor y el objeto.
Para probar el sensor KY-032 y Arduino, se puede realizar un proyecto sencillo en el que se utilice el sensor para detectar la presencia de un objeto y encender un LED o activar un buzzer como en este ejemplo. Para ello, se puede utilizar la plataforma de programación de Arduino y escribir un código que permita al Arduino interpretar los datos del sensor.
En primer lugar, se debe conectar el sensor KY-032 al Arduino siguiendo las especificaciones del fabricante. Luego, se puede conectar el buzzer al pin digital numero 9 del Arduino.
Una vez que se han realizado las conexiones, se puede proceder a programar el Arduino para interpretar los datos del sensor.
Una vez que se ha escrito el código y se ha subido al Arduino, se puede probar el sensor detectando objetos en el camino y viendo cómo suena el buzzer.
En conclusión, el sensor detector de obstáculos KY-032 es una herramienta útil para la detección de objetos en movimiento o en reposo. Su combinación con Arduino permite interpretar los datos que se recogen del sensor y tomar decisiones. Con proyectos sencillos como el descrito anteriormente, se puede probar la funcionalidad del sensor y aprender a utilizarlo en proyectos más complejos de robótica y automatización.
No te pierdas ningún video más suscríbete a nuestro canal de telegram https://t.me/carlosvolt_electronica_robotica
Tal vez pueda interesarte proyectos en arduino, pic, robótica, telecomunicaciones, suscribete en http://www.youtube.com/user/carlosvolt?sub_confirmation=1 mucho videos con código fuentes completos y diagramas

Componentes electrónicos
Arduino mini pro
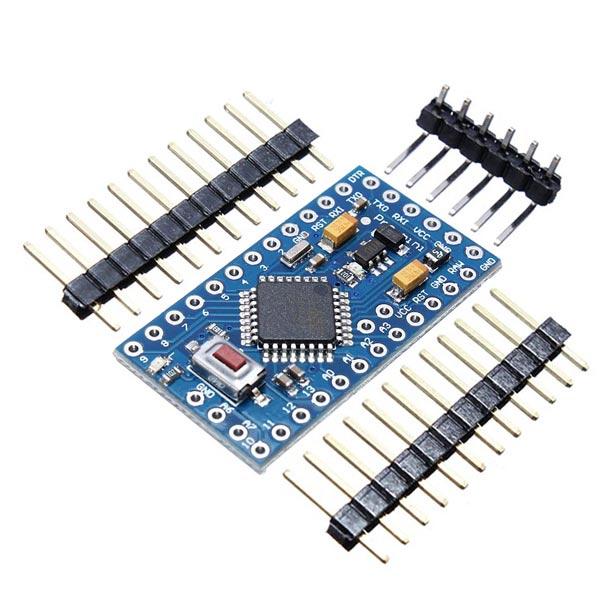
El Arduino Pro Mini es una placa de microcontrolador basada en el ATmega328 .
Tiene 14 pines de entrada / salida digital (de los cuales 6 se pueden usar como salidas PWM), 6 entradas analógicas, un resonador integrado, un botón de reinicio y orificios para montar encabezados de pines. Se puede conectar un encabezado de seis pines a un cable FTDI o una placa de conexión Sparkfun para proporcionar alimentación USB y comunicación a la placa.
El Arduino Pro Mini está diseñado para su instalación semipermanente en objetos o exposiciones. La placa viene sin encabezados pre montados, lo que permite el uso de varios tipos de conectores o la soldadura directa de cables. El diseño del pin es compatible con el Arduino Mini.
Hay dos versiones del Pro Mini. Uno corre a 3.3V y 8 MHz, el otro a 5V y 16 MHz.
| Microcontrolador | ATmega328 * |
| Fuente de alimentación de la placa | 3,35-12 V (modelo de 3,3 V) o 5-12 V (modelo de 5 V) |
| Voltaje de funcionamiento del circuito | 3.3V o 5V (dependiendo del modelo) |
| Pines de E / S digitales | 14 |
| Pines PWM | 6 6 |
| UART | 1 |
| SPI | 1 |
| I2C | 1 |
| Pines de entrada analógica | 6 6 |
| Interrupciones externas | 2 |
| Corriente CC por pin de E / S | 40 mA |
| Memoria flash | 32 KB de los cuales 2 KB utilizados por el gestor de arranque * |
| SRAM | 2 KB * |
| EEPROM | 1 KB * |
| Velocidad de reloj | 8 MHz (versiones de 3.3V) o 16 MHz (versiones de 5V) |
Pines hembra

Zócalo para arduino nano

Módulo Buzzer

PCB

Descargar archivo gerber –> pcb motor paso a paso bluetooth
SENSOR INFRARROJO DE OBSTACULOS KY-032 NE555

Detecta la salida 0, la salida 1 no es sensible al tiempo, directamente con 3V y 5V micro controlador puerto IO conectado.
Distancia de detección de 2-40 cm, distancia, buena capacidad anti-jamming. (Nota: El sensor de infrarrojos no puede detectar todos los objetos reciben la misma distancia, objetos de diferentes colores de reflexión de la luz de diferentes objetos detectados cerca oscuro distancia más corta negro, el sensor de 2-40 cm se mide contra la pared blanca de)
Velocidad, adecuado para la evitación de obstáculos inteligente coche, el seguimiento de línea blanca y negro, anti-gota, contadores de productos, líneas de corte, detección de nivel de líquido.
Este sensor se hace con líneas blancas y negras trazando el coche funcionó sin línea de negro sobre papel blanco, disponible en hormigón El entorno complejo amarillo como el camino de patrullaje línea de negro. Mientras la línea de negro alrededor del color ligeramente más claro que lata negro, eliminando los movimientos tradicionales, por lo que el diseño del medio ambiente más fácil.
El sensor 3 al suministro de 6V, amplia gama, conveniente para el sistema de 3V y 5V MCU.
Con Habilitar, ES terminal es igual a “1” cuando el sensor no funciona, igual a “0” cuando se trabaja. Salta sobre la tapa del extremo del sensor mucho tiempo después de la conexión a tierra ES (ES siempre y cuando “0”). Para utilizar el terminal EN cuando se retira la tapa del puente.
Potenciómetro de ajuste de frecuencia se utiliza para ajustar la frecuencia portadora del tubo de emisión infrarroja, debido a que el receptor 38 kHz integración, en particular, cuando la frecuencia portadora es el más sensible. El do transferido 502 resistor las agujas del reloj (es decir, el tubo de lanzamiento en el brillo máximo), y luego en una pared blanca tono 103 de resistencia, se ha transferido a la distancia de detección es el más alejado hasta el momento de manera que el sensor funciona en el mejor estado.
• Voltaje de funcionamiento: DC 3.3V-5V
• Corriente de trabajo: 20mA
• Temperatura de trabajo: + 50 grados -10degree
• Distancia de detección: 2-40cm
• Interfaz IO: 4 líneas (- / + / S / ES)
• Señal de salida: Nivel TTL
• Modo de ajuste: regulación de la resistencia a múltiples
• Ángulo efectivo: 35 °
• Tamaño: 4.5×1.1cm (aprox)
CÓDIGO FUENTE
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
int buzzer = 9; // Pin del buzzer int pinSensor = 10; // Pin 10 para el sensor de obtáculos ky-032 int valor; // variable para almacenar resultado void setup() { Serial.begin(9600); //Inizilizar el puerto serial pinMode(buzzer, OUTPUT); // Definimos el 9 como salida para el buzzer pinMode(pinSensor, INPUT); // Definimos el pin 10 como entrada, para el sensor de obtáculos } void loop() { valor = digitalRead(pinSensor); // Leemos el valor del sensor de obtáculos if(valor == LOW) //Cuando el sensor detecta un obstáculo, el buzzer del Arduino se activa { Serial.println("Obstáculo detectado"); // Mostrar mensaje en el monitor serie digitalWrite(buzzer, HIGH); } else { Serial.println("Sin obtáculo"); digitalWrite(buzzer, LOW); } } |
No te pierdas ningún video más suscríbete a nuestro canal de telegram https://t.me/carlosvolt_electronica_robotica
PROYECTO RECOMENDADO