
El módulo de reconocimiento de voz Geeetech es una herramienta versátil para proyectos que requieren control por voz. En este tutorial, aprenderás cómo controlar un servo utilizando dos comandos de voz
Tal vez pueda interesarte proyectos en arduino, pic, robótica, telecomunicaciones, suscribete en http://www.youtube.com/user/carlosvolt?sub_confirmation=1 mucho videos con código fuentes completos y diagramas

Componentes electrónicos
Arduino mini pro
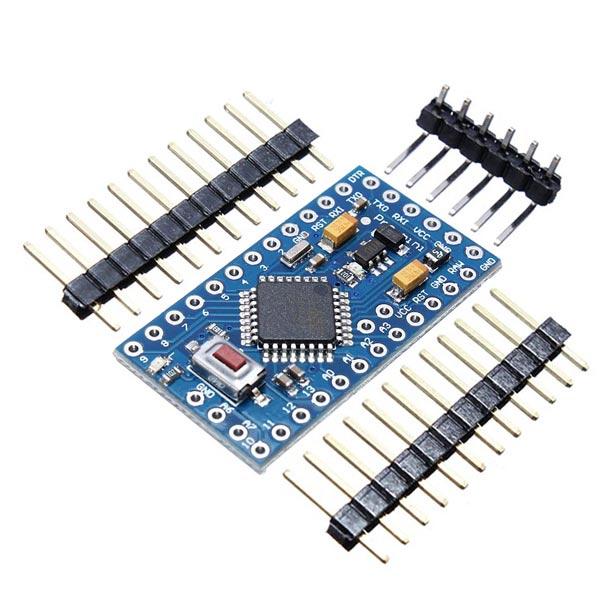
El Arduino Pro Mini es una placa de microcontrolador basada en el ATmega328 .
Tiene 14 pines de entrada / salida digital (de los cuales 6 se pueden usar como salidas PWM), 6 entradas analógicas, un resonador integrado, un botón de reinicio y orificios para montar encabezados de pines. Se puede conectar un encabezado de seis pines a un cable FTDI o una placa de conexión Sparkfun para proporcionar alimentación USB y comunicación a la placa.
El Arduino Pro Mini está diseñado para su instalación semipermanente en objetos o exposiciones. La placa viene sin encabezados pre montados, lo que permite el uso de varios tipos de conectores o la soldadura directa de cables. El diseño del pin es compatible con el Arduino Mini.
Hay dos versiones del Pro Mini. Uno corre a 3.3V y 8 MHz, el otro a 5V y 16 MHz.
| Microcontrolador | ATmega328 * |
| Fuente de alimentación de la placa | 3,35-12 V (modelo de 3,3 V) o 5-12 V (modelo de 5 V) |
| Voltaje de funcionamiento del circuito | 3.3V o 5V (dependiendo del modelo) |
| Pines de E / S digitales | 14 |
| Pines PWM | 6 6 |
| UART | 1 |
| SPI | 1 |
| I2C | 1 |
| Pines de entrada analógica | 6 6 |
| Interrupciones externas | 2 |
| Corriente CC por pin de E / S | 40 mA |
| Memoria flash | 32 KB de los cuales 2 KB utilizados por el gestor de arranque * |
| SRAM | 2 KB * |
| EEPROM | 1 KB * |
| Velocidad de reloj | 8 MHz (versiones de 3.3V) o 16 MHz (versiones de 5V) |
Pines hembra

Pines macho

Zócalo para arduino nano

Cables dupont hembra macho

PCB

Descargar archivo gerber –> pcb
Configuración del módulo
Suponiendo que ya instalamos los driver del adaptador usb serial, debemos asegurarnos de setear el programa docklight con la configuración de la siguiente imagen:
El programa docklight si no lo tienen lo descargamos de la página https://docklight.de/downloads/ es una demo funcional pero no nos permite guardar el trabajo hecho, así que atención con esto.
Para facilitarles las cosas y no tener ningún inconveniente, acá les dejo el archivo con los comandos utilizados durante el video.
Descargar–> comandos_modulo_reconocimiento_de_voz
Una vez descargado y descomprimido el archivo, debemos abrirlo en el docklight.

Nos tiene que aparecer una imagen similar a esta.
Hay que revisar que la configuración del docklight coincida con la de nuestro adapta usb serial y la del módulo de reconocimiento de voz.

Con esto configurado correctamente, ya estamos en condiciones de enviar comandos al módulo de reconocimiento de voz
Comando del módulo de reconocimiento de voz
- 0x00–>Entra en modo de espera de algún comando
- 0x01 –>Eliminar las instrucciones del grupo 1
- 0x02 –>Eliminar las instrucciones del grupo 2
- 0x03 –>Eliminar las instrucciones del grupo 3
- 0x04–>Eliminar las instrucciones de los 3 grupos
- 0x11–>Comienza a grabar instrucciones del grupo 1
- 0x12–>Comienza a grabar instrucciones del grupo 2
- 0x13–>Comienza a grabar instrucciones del grupo 3
- 0x21–>Importar grupo 1 para la utilización de los comandos de voz
- 0x22–>Importar grupo 2 para la utilización de los comandos de voz
- 0x23–>Importar grupo 3 para la utilización de los comandos de voz
- 0x24–>Consulta los grupos grabados
- 0x31–>Cambia la velocidad a 2400 bps
- 0x32–>Cambia la velocidad a 4800 bps
- 0x33–>Cambia la velocidad a 9600 bps
- 0x34–>Cambia la velocidad a 19200 bps
- 0x35–>Cambia la velocidad a 38400bps
- 0x36–>Cambia a modo común
- 0x37–>Cambia a modo compacto
- 0xbb–>Información de la versión del módulo
Parámetros
- Voltaje: 4.5-5.5V
- Corriente: <40mA
- Interfaz digital: 5V TTL
- Interfaz análoga: conector del micrófono mono-canal de 3.5mm + interfaz pin del micrófono
- Tamaño: 30m mx 47.5m m
Este kit está compuesto de un módulo de reconocimiento de voz, un módulo usb serial, cables y un micrófono.

Código Fuente
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 |
#include <Servo.h> Servo myServo; // Crear un objeto Servo int servoPin = 12; // Pin del servo byte comando = 0; void setup() { Serial.begin(9600); // Velocidad a la que trabaja el módulo de reconocimiento de voz myServo.attach(servoPin); // Asignar el pin al servo myServo.write(90); // Inicializar el servo en la posición central delay(500); // Comando para cambiar al modo compacto Serial.write(0xAA); Serial.write(0x37); delay(500); // Importa el grupo 1 Serial.write(0xAA); Serial.write(0x21); } void loop() // Correr una y otra vez { while (Serial.available()) { // Captura los caracteres del puerto serial y se los asigna a la variable "comando" comando = Serial.read(); // Se compara la variable "comando" switch (comando) // Estructura de control switch, case { case 0x11: // Si el valor es 11, mueve el servo a 0° myServo.write(0); break; case 0x12: // Si el valor es 12, mueve el servo a 45° myServo.write(45); break; case 0x13: // Si el valor es 13, mueve el servo a 90° myServo.write(90); break; case 0x14: // Si el valor es 14, mueve el servo a 135° myServo.write(135); break; case 0x15: // Si el valor es 15, mueve el servo a 180° myServo.write(180); break; } } } |
Si deseas que revise algún producto escríbeme a reviews@rogerbit.com (sólo contacto empresarial ).
No te pierdas ningún video más suscríbete a nuestro canal de telegram https://t.me/carlosvolt_electronica_robotica
PROYECTO RECOMENDADO